Publish
Publish messages on a topic back to your robotics stack.
Settings
General
| field | description |
|---|---|
| Editing mode | When enabled, editing the message is allowed and the content is displayed. When disabled, only the button is visible. |
| Button title | Label for the button that publishes a message |
| Button tooltip | Tooltip for the button |
| Button color | Color of the button |
User interactions
Specifying the topic you want to publish your message on will automatically infer its schema name and populate the text field with a JSON message template.
Clicking into the schema name field will provide a dropdown list of common ROS schemas. Selecting a schema will also populate the text field with a JSON message template.
Edit the template to customize the message you want to send back to your ROS stack, before hitting "Publish".
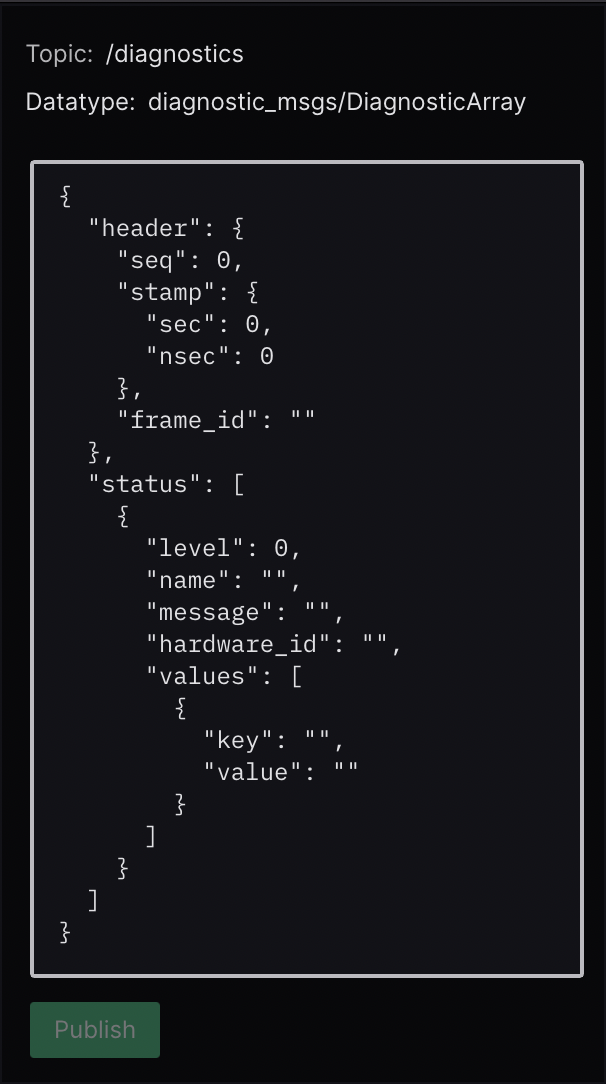
The "Publish" button will be disabled if Foxglove is not connected to a data source that supports publishing. When connecting to a WebSocket server that implements the Foxglove WebSocket protocol, the server must declare the clientPublish capability in order to support publishing from Foxglove.