Importing data
Import ROS 1 (.bag) and MCAP (.mcap) data files into the Foxglove platform for later visualization and analysis.
Check out the MCAP docs for more information on converting other data formats – like ROS 2, Protobuf, JSON, and more – into the MCAP file format.
Import via UI
(Optional) Add devices
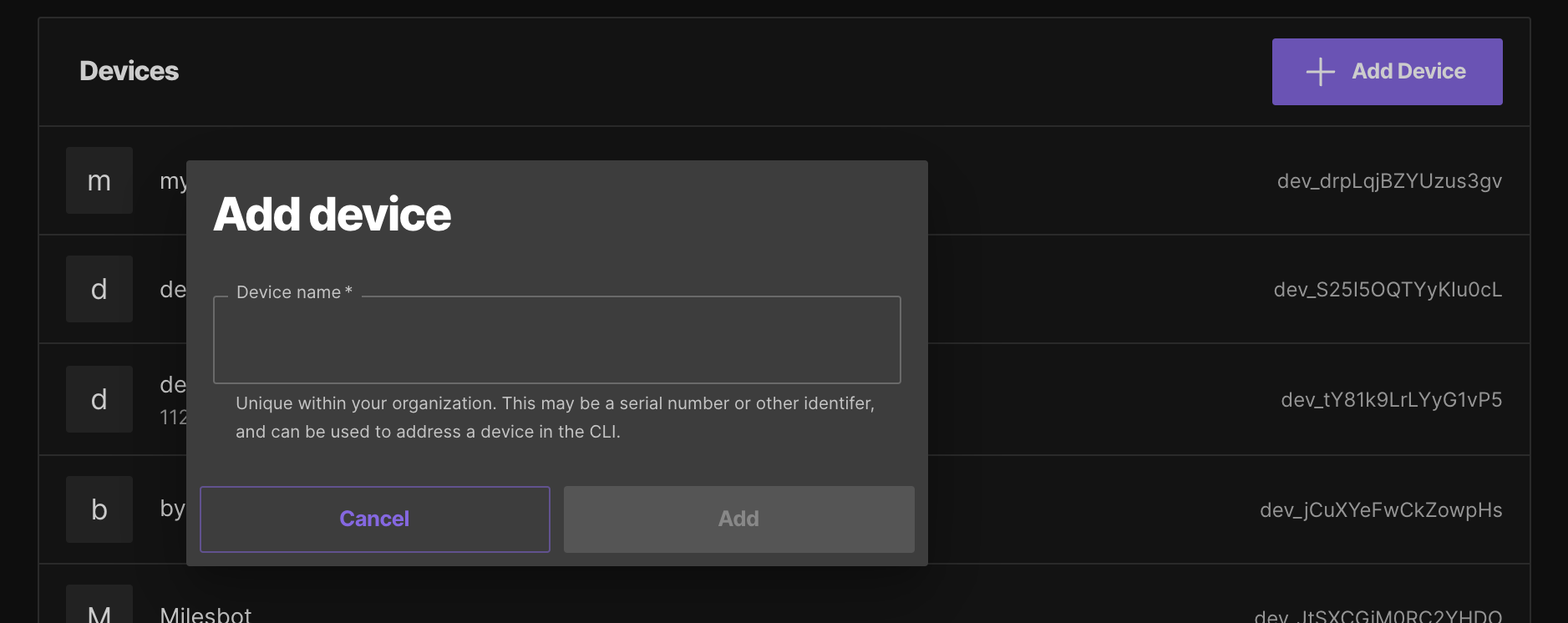
To organize files by the robot they were recorded on, create uniquely named devices for every real or simulated robot you want to track. Files do not have to be associated with a device to import them.
Click "Add device" on the Devices page to create your devices:
Import files
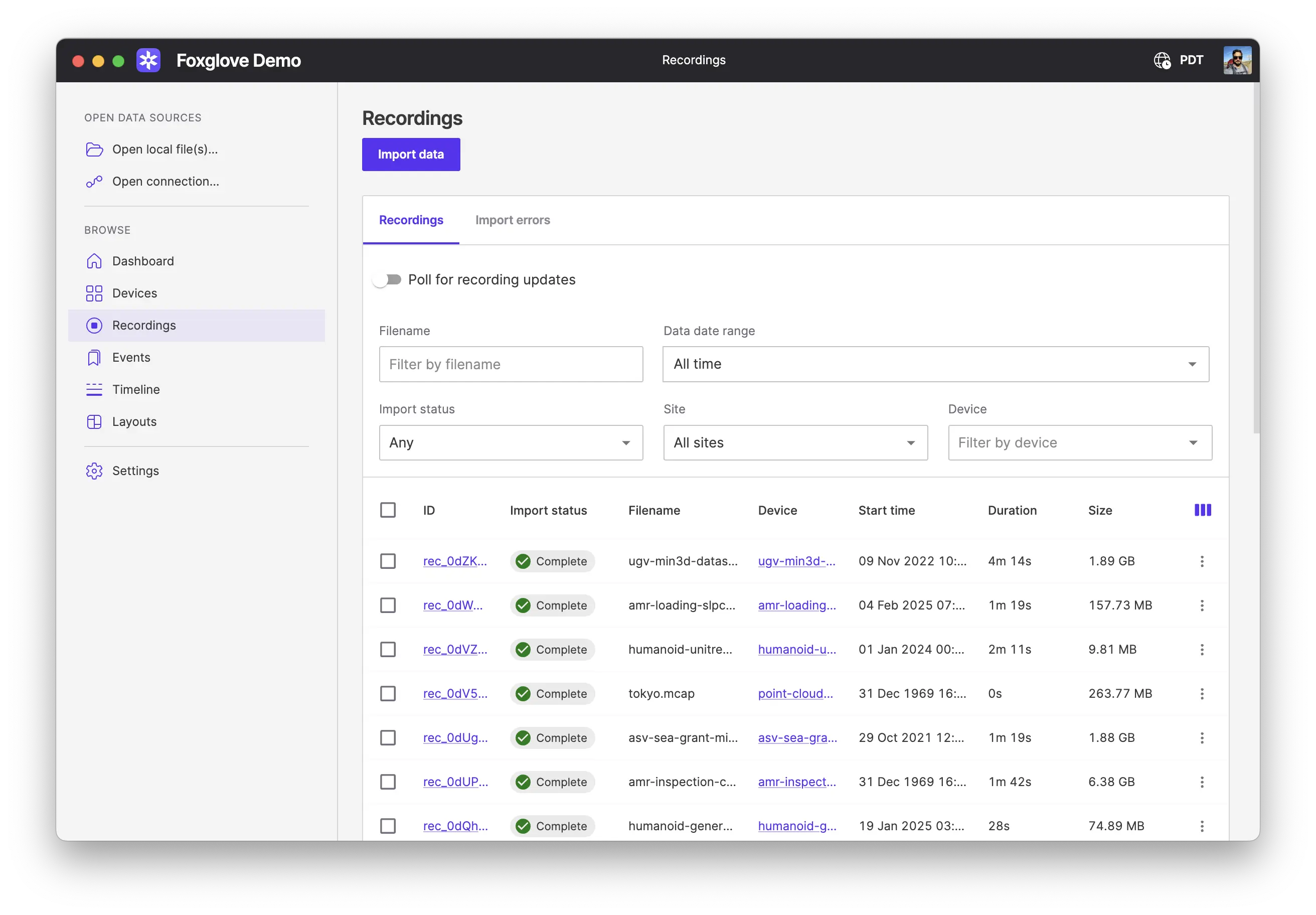
Import data from the Recordings or Timeline page:
Alternatively, you can click on one of your created devices on the Devices page to go to its details page – from there, you can import data directly to that device.
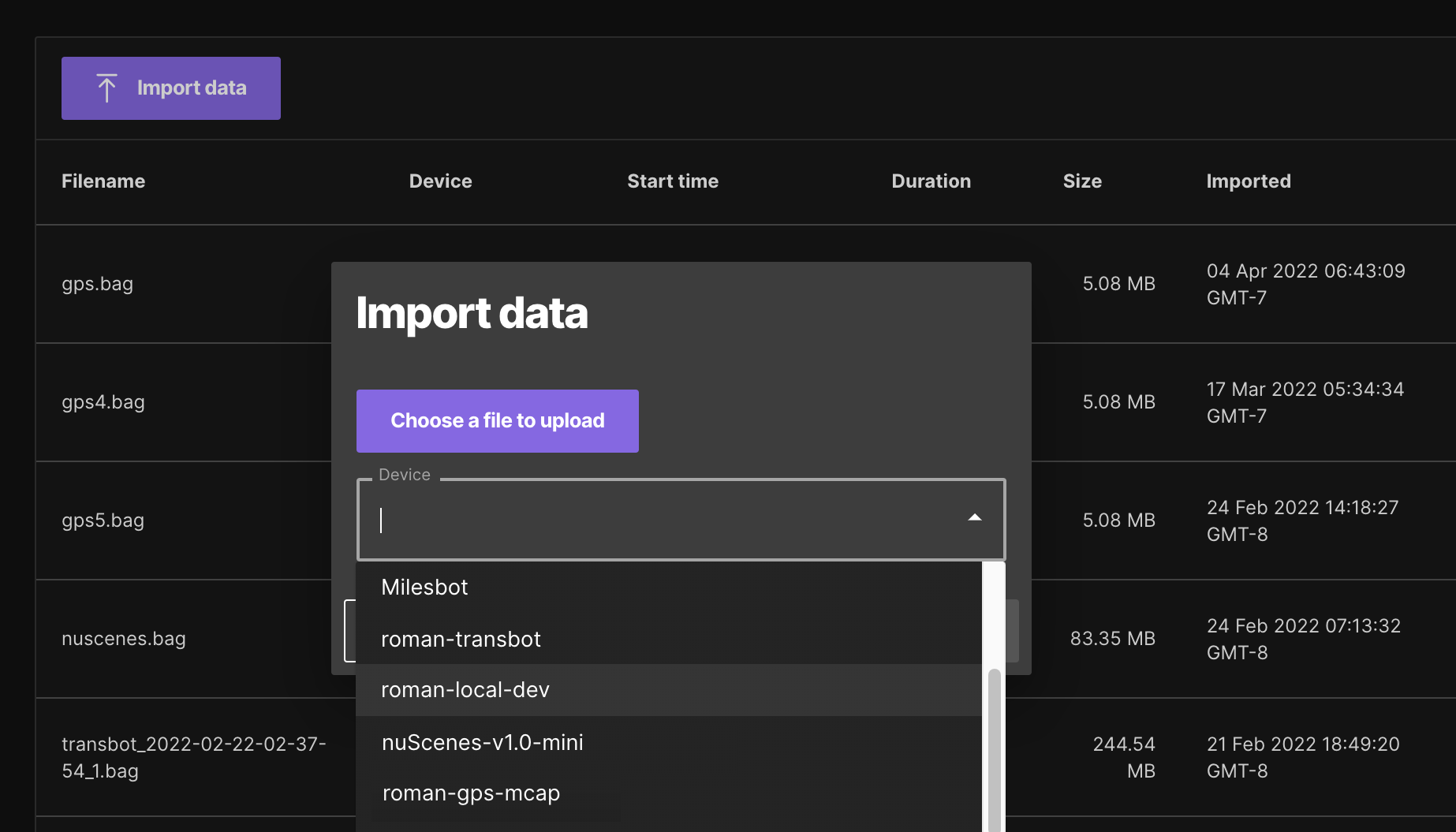
Select the file you want to import, and the device you want to associate with the recording if desired:
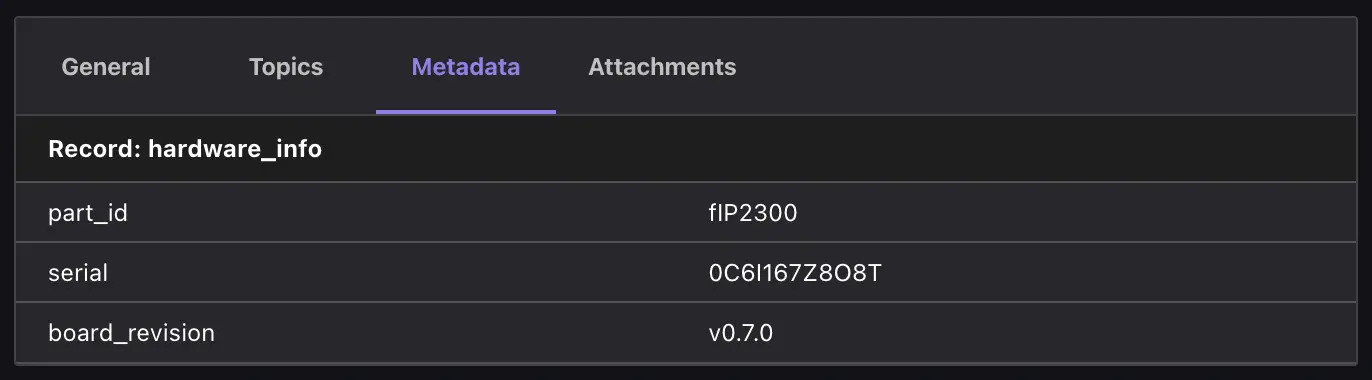
When importing MCAP files with metadata records or attachments, Foxglove will index and display them under the Metadata and Attachments tabs on the recording's details page:
View recordings
View imported data as a list on the Recordings page, or as ranges on a timeline on the Timeline page.
Diagnose and resolve errors
The Import Errors tab of the recordings page lists files that have failed to import. Failures will be automatically retried if the file is not malformed. If a file is malformed or fails to import after being retried a maximum number of times, it is "quarantined".
You can use the MCAP CLI to diagnose and recover malformed files that fail to import. To do this, first open the menu at the right of the failed import row and click "Download". Then, run mcap doctor to diagnose faults. The mcap recover subcommand will attempt to fix the problem automatically.
If a file is quarantined, but you believe that it is not malformed, open the menu at the right of the row and click "Retry" to manually retry the import process. If you require additional support importing your data, contact us at [email protected].
Import via API
See https://docs.foxglove.dev/api#tag/Recordings/paths/~1data~1upload/post for more information on importing data via the Foxglove API using an API key.